


BISAC NAT010000 Ecology
BISAC NAT045050 Ecosystems & Habitats / Coastal Regions & Shorelines
BISAC NAT025000 Ecosystems & Habitats / Oceans & Seas
BISAC NAT045030 Ecosystems & Habitats / Polar Regions
BISAC SCI081000 Earth Sciences / Hydrology
BISAC SCI092000 Global Warming & Climate Change
BISAC SCI020000 Life Sciences / Ecology
BISAC SCI039000 Life Sciences / Marine Biology
BISAC SOC053000 Regional Studies
BISAC TEC060000 Marine & Naval
This work presents the description and results of drifter experiments which were held in coastal zone of the Black Sea every summer and sometimes in autumn since 2013. Surface GSM/GPS drifters were used for observation coastal currents with spatial resolution 100–200 m and temporal variability from 5-10 minutes . Some parameters of sub-mesoscale eddies was described due to experiments. An optional battery pack allowed to extent autonomy to 19 days (one of the drifters covered a distance of ~ 300 km).The results of experiments include a comparison of the drifter trajectories with bottom-tracked ADCP and moored ADCP data. The speed and direction of current velocity from the ADCP data coincide with the data from drifters. We demonstrate that using drifter data for analysis of water dynamics gives a more comprehensive pattern of actual processes in comparison to using the ADCP data alone.
drifter, Black Sea, coastal dynamics, sub-mesoscale eddies, coastal currents
I. INTRODUCTION
Sea and ocean shelf zones exist under extremely various natural conditions. They experience intense spatial and temporal variability in a wide range of scales. Furthermore sea currents become one of the main parameters for environmental monitoring. In this aspect, study of the coastal water dynamics is required for oil and gas exploration and researches related to its influence on the marine environment.
Coastal zone of the Black sea is a complex and very dynamic system. There are such processes as eddies, Black Sea Main Rim Current, wind-driven currents, coastal trapped waves, etc. [1,4,9] Institute of Oceanology established a sub-satellite research site near Gelendzhik [2], where the monitoring of coastal processes is hold. One of the first there was installed moored ADCP (Acoustic Current Doppler Profiler), but it was not enough for studying spatial picture of the dynamics. Than ADCP in bottom-track mode was used, that’s how sub-mesoscale eddies were fixed in this region. Quasi-simultaneity of these surveys didn’t describe full temporal variability of the processes. So complex experiments with surface drifters and ADCP appeared. Such Euler’s and Lagrangian methods in the researches allow us to describe complex coastal dynamic system better.
In section 2 we briefly described all the equipment and methods that are used to collect the data. Results of the experiments presented in section 3. There we compare observed drifter trajectories with currents from ADCP and with real wind data. In section 4 we discussed about our experience from 2013 to 2015 and conclude some results.
II. DATA&METHODS
Drifter’s design.
Drifter has a float, which bears a GPS receiver with a built-in GSM data transmitter, a drogue, and an anchor (Fig. 1). The main requirement for drifter design, in order to ensure the correct assessment of currents, is to minimize wind force. This is achievable when the sectional area of the above-water components is much smaller those in the water. In foreign studies, the ratio of the areas of the drogue and the above-water component of the drifter is designated as DAR (drag area ratio). In our case, the DAR is about 40.
.jpg)
The drifter is designed to estimate the speed and direction of the current in a 1 m-layer. The drogue is a frame made of plastic pipe, 20 mm in diameter. Polypropylene textile is fixed on the frame. Depending on the aim of the experiment, the drogue could be placed at a chosen depth by changing the length of connecting rope. The plastic frame is made half-portable to simplify its transportation. When folded, the 5 drifters occupy a volume of about 1 m3. The weight of 5 kg is enough for completely submerge of the drogue with positive buoyancy. A surface float (15×15×10 cm) bears a watertight box containing a GPS receiver Proma-Sat 1000/Snooper equipped with a GSM module for transmitting coordinates. The specifications of the GPS-transmitter are given in [6]. The software of the system supports fine tuning for efficient operation. In the process of adjustment, an operator sets a continuous or periodic mode of operation, the spacing of data transmission via SMS - or GPRS-channels, response at beginning and ending of travel, etc. More details about drifter’s specifications are given in [5,6,7].
Moored ADCP.
The acoustic Doppler current profiler Workhorse 600 kHz, manufactured by TRDI firm, is permanently deployed as a component of the moored station in Golubaya Bay at a depth of 23 m and 1 km from the coast. Data is transmitted via a telemetry channel to the shore in real-time. Detailed description of the instrument is given in [3].
ADCP towed in a gondola.
In addition, current velocity was measured with the ADCP TRDI Sentinel 300 kHz mounted in a special gondola. This hardware secured the recording of vertical profiles of currents in the shelf zone at a depth of 250 m. The mode of operation of the ADCP allows calculating the actual current velocity during vessel’s travel (bottom tracking). The horizontal components of current velocity were measured accurate to 2–3 cm/s at a vertical resolution of 1.5–2.5 m. The instrument was towed with the research vessel Ashamba in five tracks from the coast to the shelf edge (200 m isobath). The investigation of sub-mesoscale eddies with the help of a towed ADCP instrument was described in [1].
Meteorological information.
We used the data of the Automatic Weather Station which services by Faculty of Geography Lomonosov MSU. This station located on the roof of the cabin at the end of the SB SIO RAS pier. Wind velocity is measured every 5 min. Before using these data in our work, we averaged the data with a running mean at a step of 30 min. We also used data from the Gelendzhik weather station (Rosgidromet) is located near the entrance to Gelendzhik Bay at Cape Tolstyi. At this station, wind is measured in the standard meteorological scheduled time frame (every 3 h); they include the wind direction and the mean and maximum (bursts) wind velocity. The mean wind velocity is determined over 10 min, while the maximum velocity (the maximum wind burst between times of measurements) is determined over 3 h. T
Description of experiment.
At the beginning of the experiment, drifters are launched at pre-planned points and left to travel freely. GPS receivers must be turned on and pre-programmed for the desired mode of operation. The drifter's position is determined at a specified rate. The coordinates obtained are transmitted via communication channel GSM/GPRS to the Proma-Sat web server. The mapping application http://map.proma-sat.ru enables real-time monitoring of the localization and trajectory of each drifter. Alternatively, the coordinates may be sent using SMS messages from transmitter to the user's cellular phone, at a specified rate. If the drifter is beyond the zone of GSM-coverage, the command will be executed as soon as the GSM is available. The real-time monitoring of drifters solves the problem of searching for the drifters after the experiment. In our case, a vessel arrives exactly at site of the last communication and picks up the drifter. Unfortunately GSM coverage is non-uniform and unstable in time. The zone of stable signal has to be experimentally determined. In the Northeastern Black sea region it’s about 25 kilometers from the shore. One of the advantages of combining a mapping web-application and GPS-monitoring is the capability to view the tracks' history and to export the data as a text file. See [5-7] for details of operation of drifter system.
III. RESULTS
Initially, the main purpose of the experiments was to confirm the existence of sub-mesoscale eddies in the Black sea shelf zone. So, drifters were launched during the ADCP towing in the bottom track mode. At Fig. 2 current velocities from ADCP and drifter tracks are pictured for September 2013.
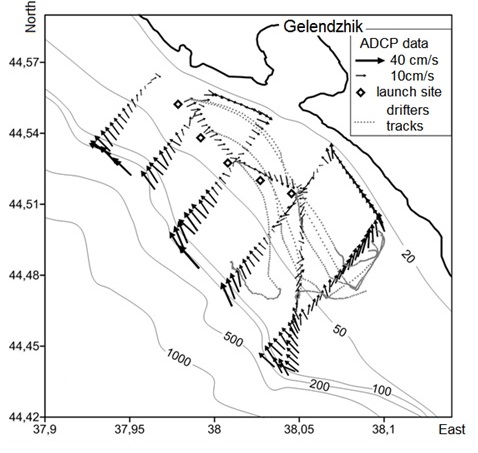
Fig. 2. Experiment 29-30 September 2013. Speed and direction of current from data of towed ADCP and drifters tracks. Thin lines designate depth contours (m).
Due to such experiments we found that observed lifetime of the small eddies (size of less than 15 km), fixed in this region, is less than 24 hours. Eddy velocities range is 20 cm/s - 70 cm/s in the active phase and 5-10 cm/s when it dissipated. At fig.3 another eddy is pictured. Its sizes is appr. 12 km lengthwise and 6 km across.
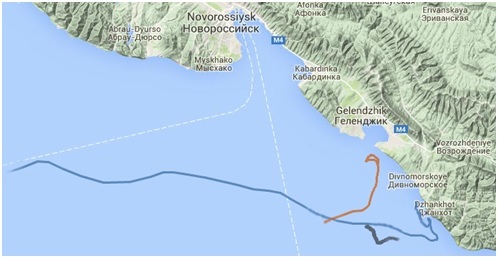
The next task was observation of other coastal dynamic processes. For example, the situation when there is flow of the Black Sea Main Rim Current near the coast. Usually drifters indicate this flow as stable fast flow. Through this flow drifters move to the north-west with velocities more than 40cm/s. Fig.4 presents the experiment from 2014, when one of the drifters reached coastal waters of the Crimea, see [8]. The “Crimean” drifter also showed us the cycloid motion that points to eddy existence near Crimean coast. Diameter of this anticyclone was about 15 km. It moves to the southwest with general speed of 20 cm/s.
 хрень.jpg)
Fig. 3. Experiment 21 June 2013. Speed and direction of current from data of towed ADCP and drifters tracks. Thin lines designate depth contours (m).

Fig. 4. Experiment 11 - 17 October 2014 (launched 29 September near Gelendzhik). “Crimean”drifter.
Trajectory of drifter, which also got into Rim Current at 2015 shown at fig.5. First three days of the september experiment drifters moved according to the weak wind with velocities less than 10 cm/s. At fourth day drifters were picked by Black Sea Main Rim Current, one of them was left there, while others have been removed. Velocity of the current was 40-50 cm/s.
Besides the Black Sea Main Rim Current, in the absence of its intensification, there were held few experiments for defining the wind component of the water dynamic and its properties. One of them 27 September 2015 is shown at fig. 6a and fig. 6b. First, there were launched 3 drifters with drogue depths 0.5-1.5m, 3-4m and 5-6m. Surface drifter was launched several times at the same point. According to meteostation in Gelendzhik till the night before the experiment wind was northeastern and weak. 27 September 2015 at 10:00 there was a short change of direction to southeast but wind was still less than 5 m/s. At fig.6b we see the adaptation of the water at first moments after change. At fig.6a we noticed that current is turning clockwise with the depth that points to involvement of the lower water layers as it postulated at the theory of Ekman spiral.
.jpg)
A simultaneous reverse turn has been performed by drifters at 2:00-4:00 on September 30 2014
(fig.7). Other data for this experiment you could find in [7]. The last and first drifters were spaced more than 20 km apart, which points to the probable presence of a coastal trapped wave. Some indicators of the coastal trapped wave presence in this region described in [9]
1. A. G. Zatsepin, V. I. Baranov, A. A. Kondrashov et al., “Submesoscale eddies at the Caucasus Black Sea shelf and the mechanisms of their generation,” Oceanology , 2011, Vol. 51, No. 4, pp.554-567.
2. A. G. Zatsepin, A. G. Ostrovskii, V. V. Kremenetskiy et al., “Subsatellite polygon for studying hydrophysical processes in the Black Sea shelf-slope zone” Izv., Atmos. Ocean. Phys., 2014, Vol. 50 , No.1, pp.13-25.
3. A. G. Zatsepin, V. B. Piotouh, A. O. Korzh, O. N. Kukleva, and D. M. Soloviev, “Variability of currents in the coastal zone of the Black Sea from long-term measurements with a bottom mounted ADCP,” Oceanology, 2012, Vol.52, No 5, pp. 579-592
4. A.A. Kubryakov,S.V. Stanichny “Seasonal and international variability of the Black Sea eddies and its dependence on characteristics of the large-scale circulation” Deep Sea Research Part I: Oceanographic Research Papers. 2015. Т. 97. С. 80-91.
5. S. A. Myslenkov, A. G. Zatsepin, K. P. Silvestrova, and V. I. Baranov, “Implementation of drifting buoys and towed profiler for analysis of shelf currents in the Black Sea” Vestnik Moskovskogo Universiteta, Ser. 5: Geogr., 2014, No. 6, pp.73-80.
6. S. A. Myslenkov and T. E. Samsonov, “Analysis of shelf current in the Black Sea using GNSS monitoring” Izv. VUZov, Geodez. Aerofotos”emka, 2014, No. 3, pp.60-68.
7. K. P. Silvestrova, S. A. Myslenkov, A. G. Zatsepin et al., “GPS-Drifters for Study of Water Dynamics in the Black Sea Shelf Zone” Oceanology, 2016, Vol. 56, No. 1, pp. 150-156.
8. К.P. Silvestrova , Е.V. Krayushkin, S.А.Myslenkov “Comparison of drifter and ADCP data in a subsatellite test site in the Black Sea” Sovremennye problemy distantsionnogo zondirovaniya Zemli iz kosmosa, 2015, Vol. 12, No. 3, pp. 171-184
9. V.S. Tuzhilkin, V.S. Arkhipkin, S.A. Myslenkov, T.V . Samborsky “Synoptic variability of thermo-haline conditions in the Russian part of the Black Sea coastal zone” Vestnik Moskovskogo Universiteta, Ser. 5: Geogr., 2012, No. 6, pp.46-53